二輪で自立走行する玩具 MiP バランスロボット を題材に、倒立振子ロボットの仕組みと自作手順を解説します。
ジャイロ/加速度センサーで姿勢を検知し、PID制御でバランスを保つ原理を図とコード付きで丁寧に紹介。部品選定からチューニング、改造アイデアまで網羅した入門ガイドです。
ジャイロ/加速度センサーで姿勢を検知し、PID制御でバランスを保つ原理を図とコード付きで丁寧に紹介。部品選定からチューニング、改造アイデアまで網羅した入門ガイドです。


Q. サンプルコードはどこ?
A. **オーム社公式の「ダウンロード」**にzip(約24KB)。本書購入者向け、著作権等の注意書きあり。 ohmsha.co.jp
Q. 正誤表はある?
A. 公式記載「正誤表はございません」。 ohmsha.co.jp
Q. 電子版は?
A. Amazon Kindle/達人出版会/BookWalkerなどで入手可(試し読みありのサイトも)。 Amazon Japan達人出版会電子書籍ストア | BOOK☆WALKER


第1章 Azureのアーキテクチャ概要第2章 AzureではじめるPowerShell第3章 Azure Storageの管理第4章 ヴァーチャルマシンへの配備第5章 ヴァーチャルネットワークの設定第6章 Azure Web Appsの配備第7章 Azure SQL Database(の操作)第8章 Azure Automation(の操作)第9章 Azure RemoteApp(の操作)第10章 Azure Active Directoryの管理第11章 Azure RMS第12章 Azure HDInsight クラスタの構築管理

MDP:状態・行動・遷移・報酬で問題を定式化する土台。
動的計画法:モデル既知前提で価値・方策を反復更新して最適化。
モンテカルロ:エピソード平均で価値推定。モデル不要・高分散。
TD学習:1歩先の推定でブートストラップ更新。オンラインに向く。
SARSA:実行中の方策で更新するオンポリシー。安全寄り。
TD(λ):エリジビリティ痕跡で多段のTD誤差を混合。
Q学習:max行動で更新するオフポリシー。理論収束性が強い。
近似(線形/カーネル):特徴表現で連続空間の価値関数を近似。
政策勾配:方策を確率分布として直接最適化(REINFORCE等)。
三目並べ:離散・完全情報で基礎検証に最適。
Mountain Car:連続状態で谷脱出。探索設計がカギ。
Acrobot:二重振子のスイングアップ。制御系の定番難題。
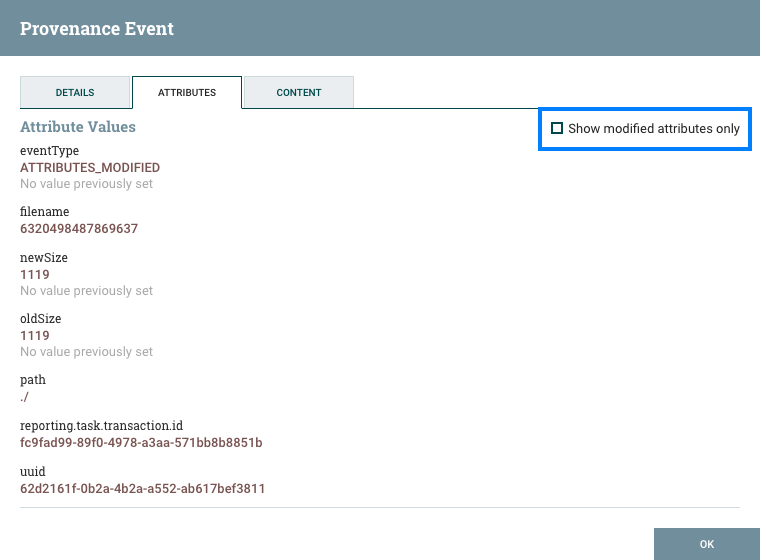
> The API lives at /nifi-api, so the address you are looking for would > be http://localhost:8080/nifi-api/controller/about
httpsが必要なものがあるようで、とりあえず呼べたのはこれ
http://localhost:8080/nifi-api/controller